Robotizace a autonomie činností se stávají fenoménem dnešní doby, kterým se aktivně zabývá i několik kateder Univerzity obrany. Řadu činností jsou v dnešní době roboti schopní provádět nesrovnatelně rychleji než lidé. A jediný, kdo je jim schopný konkurovat, je opět robotický autonomní systém. Zatím to však ale neplatí pro autonomní přesun vojenských pozemních robotických systémů členitým terénem, pokrytým různými druhy husté vegetace, náletovými dřevinami či lesními porosty.
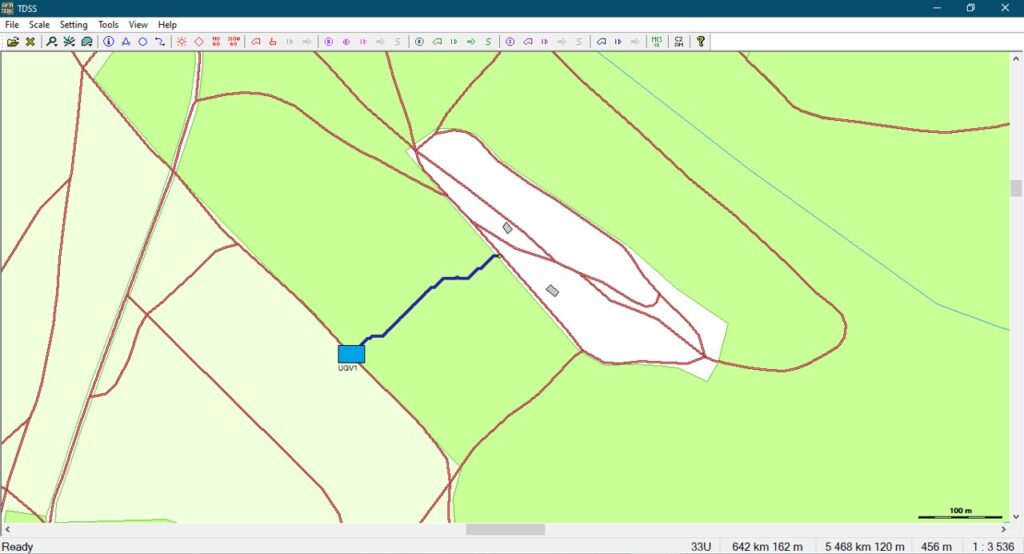
V průběhu měsíce května a června se v prostoru VVP Březina, za účasti příslušníků a studentů katedry 110, 211, FEL ČVUT a společnosti LPP, uskutečnilo testování globální a lokální autonomní navigace robotického systému TAROS Furbo, vyvinutého společností VOP CZ ve spolupráci s Univerzitou obrany. Globální navigace do prostoru plnění úkolu vozidla byla realizována s využitím matematických algoritmických modelů systému pro kontrolu manévru TDSS (Tactical Decision Support System), vyvíjeném na Univerzitě obrany. Lokální navigace pak byla upřesňována prostřednictvím výsledků snímání 3D laserového radaru (LIDAR) a optických senzorů okolí vozidla. Všechny vstupy byly vyhodnocovány řídící jednotkou vozidla, která zabezpečovala nejefektivnější dosažení prostoru cíle, na základě definovaných kritérií rychlosti a významnosti identifikovaných překážek.
Autonomní navigace TAROS Furbo po plánované trase členitým terénem byla také praktickou přípravou pro účast na zkouškách autonomních vozidel, pořádaných pod záštitou projektu iGUS (integrated Unmanned Ground System), které se budou konat v červnu 2023 v Estonsku.
Autor: Jan Nohel